Les réalisations techniques face aux défis du
XXIe siècle : intelligence artificielle
Le système du robot peut se décomposer en trois grandes parties : l'exploration du labyrinthe, la détection suivie de l'identification et la saisie de la balle, et enfin le transport de celle-ci jusqu'à la sortie. Chacune de ces étapes a nécessité une recherche sur l'aspect mécanique du robot, sur sa programmation et la résolution de problèmes rencontrés afin d'automatiser le comportement du robot et de le rendre entièrement autonome. Ces trois étapes sont l'objet des sous-parties suivantes.
La fonction d'usage pourrait être : « Faire sortir une balle de couleur définie d'un labyrinthe, sans le détériorer, grâce à un robot, de manière automatique et autonome. »
Ainsi, afin d'explorer la totalité du labyrinthe et de trouver la balle puis la sortie, le robot longe en continu le mur à sa droite et tourne à gauche s'il est bloqué par un mur face à lui. Comme le labyrinthe ne comprend pas d’îlots, le centre étant rattaché au reste du labyrinthe, il ne risque pas de tourner en rond. Il trouve la balle et l’identifie puis la mène jusqu’à la sortie dans un préhenseur que nous fabriquons : une pince placée à l‘avant du robot. Le labyrinthe est surélevé et arrivé à la sortie la balle tombe : le robot ne la détecte plus dans ses pinces et s’arrête.
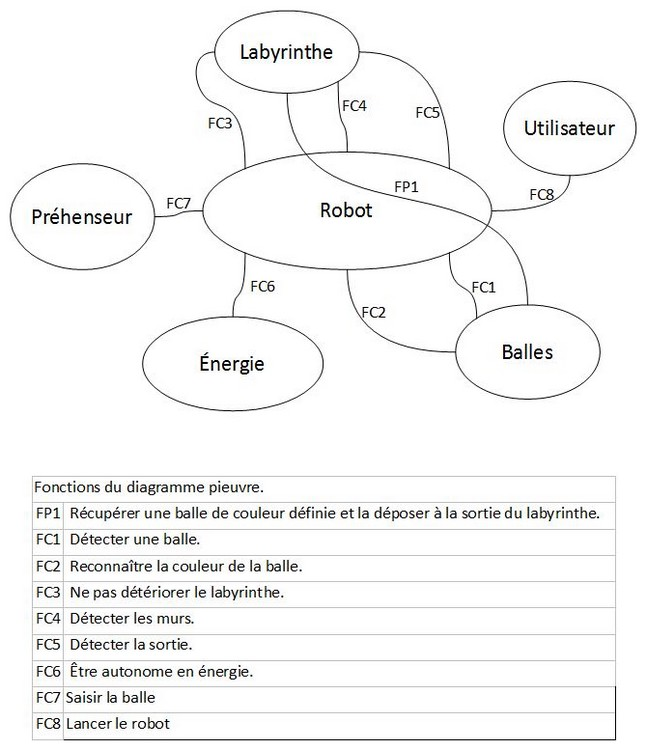
Le diagramme pieuvre qui suit permet de déterminer les différentes fonctions d'usage et fonctions principales du robot (cliquer sur l'image pour l'agrandir) :
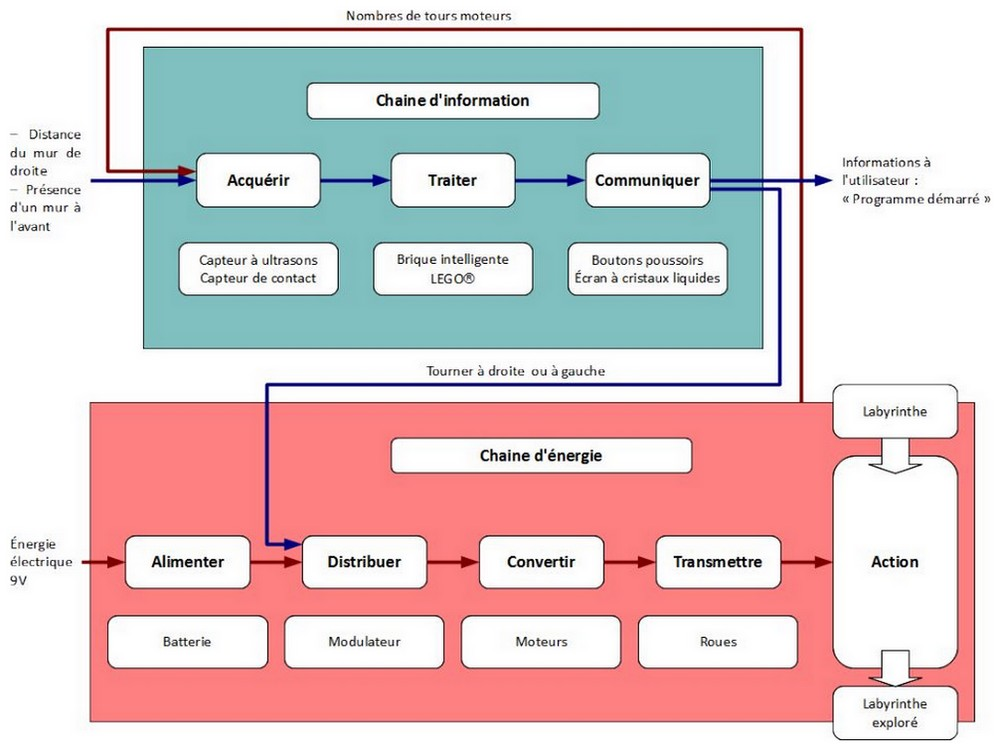
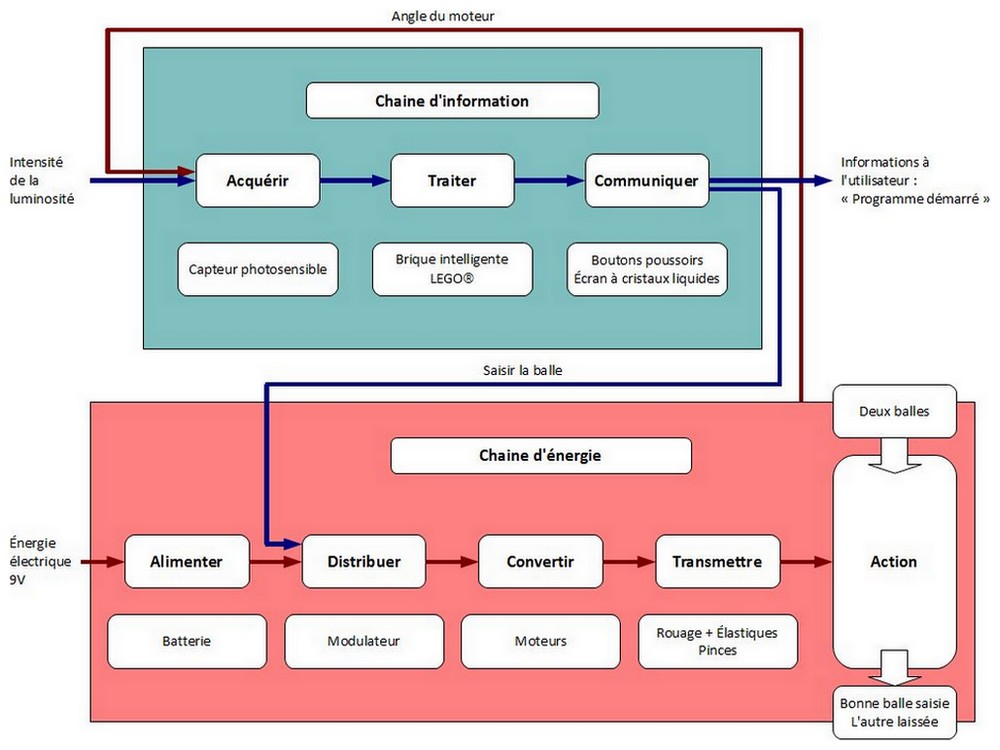
Le système du robot peut se décomposer en trois parties :
Ainsi trois chaines d'information et d'énergie peuvent ressortir.

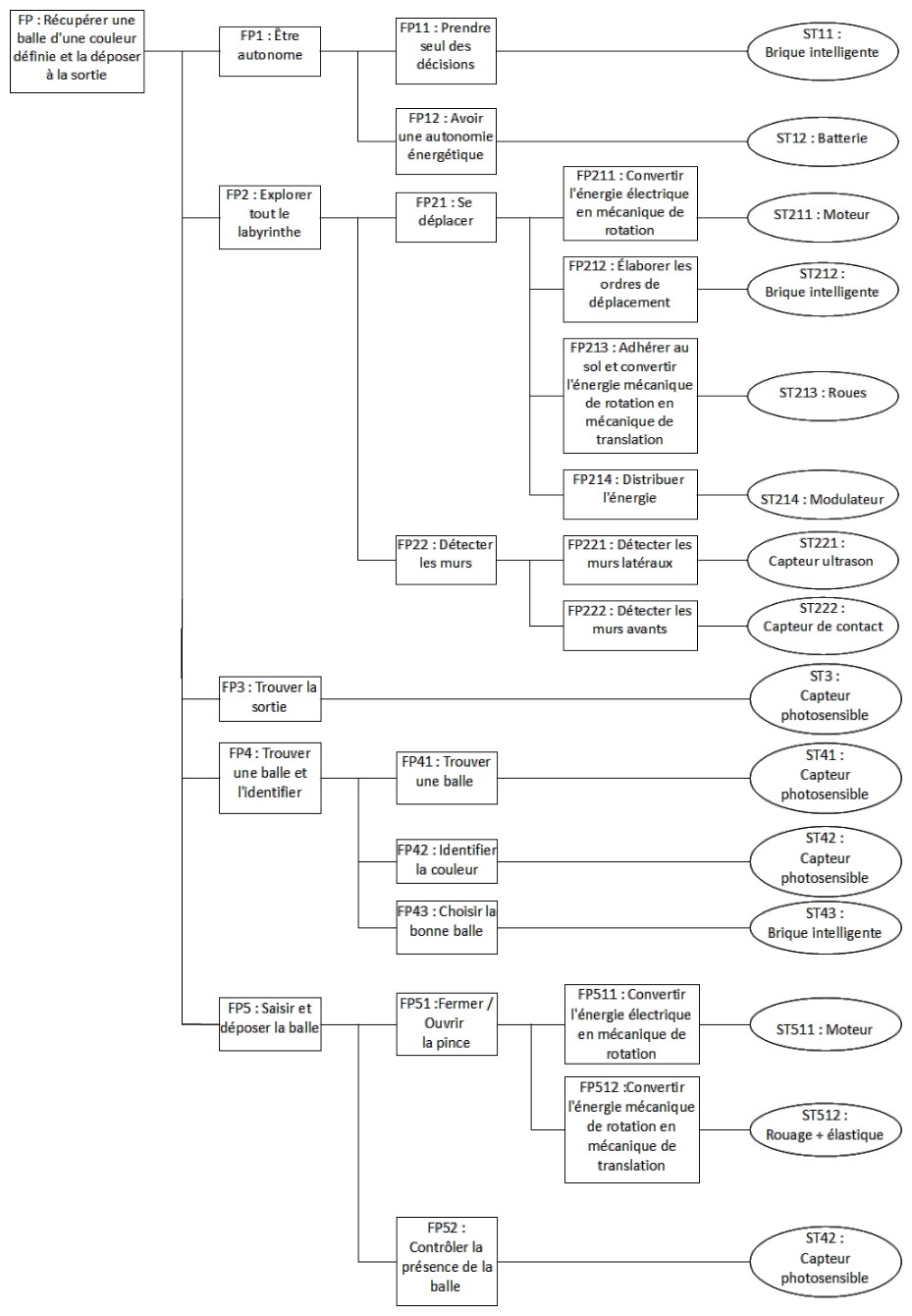
Nous avons pu ensuite dresser le diagramme FAST (Technique d'Analyse Fonctionnelle de Systèmes) permettant de traduire les fonctions techniques en solutions. Il se lit de la gauche vers la droite, dans une logique du pourquoi au comment :